
AYRS meeting at Thorpe (Surrey UK) – 3rd Nov 2019
Report by John Perry –

Another busy meeting with a constant flow of presentations from about 09:30 through to 16:30, albeit with a lunch break and a few coffee/tea breaks. It seems that the AYRS still has members who are busy with projects and who are constantly coming up with new ideas. But if the society is to continue with its current and longstanding ‘business model’ we would just like to see a bit more written about all these ideas and projects so that we can send out more publications!
Weymouth Speedweek 2019
Fred Ball started the proceedings with a review of the Weymouth Speedweek held in October. Speedweek this year offered superb sailing for windsurfers and kite surfers with strong winds throughout the week, rising to gale force at times. The wind direction was consistently from the south west giving flat water in the lee of Chesil beach. These conditions enabled the speed sailing record for Portland Harbour to be broken several times during the week. The final record stands at 41.2 knots held by kite surfer James Longmuir, although, as Fred noted, kite surfers and windsurfers were about equally included in the ten fastest times of the week. For further details see www.speedsailing.com
The strong winds which so well suited the kite and board sailors overwhelmed the two small experimental craft present and neither of these were able to complete a run down the speed course. Malcom Barnsley – lead designer for the world record holder ‘Sailrocket’ – brought along his small trimaran (about 12 foot main hull length), this now having been fitted with two fully immersed Tee foils close by the main cross beam, together with a Tee foil rudder. It was only briefly afloat at Portland this year, we hope to see more of it another time.

The other experimental craft was Fred Ball’s own trimaran, about 14 foot main hull length and overall beam just a little less than the length. Fred’s trimaran was fitted with two different experimental floats, both intended to be planning hull forms, the idea being to compare the merits of these two float designs. Fred did say that with hindsight it would have been better to compare each experimental float in turn against one of the proven floats previously fitted to this craft rather than comparing two unknown designs. Fred had this craft afloat three times during the week and every time it refused to answer the helm properly, tending to gently turn into the wind then come to a near standstill. The second time Fred sailed this boat it was towed by a safety boat to get it moving and then it did sail moderately quickly out of the marina area and into the wild foam tossed waters of the main harbour – see photo above. At that point the lee bow (the one with the big box shape at the front) started to submerge, despite having considerable volume. At that point Fred wisely took a tow from a safety boat back to the shore. For his final attempt Fred unfastened the cross beams and reattached them a few inches higher so that the floats were only very slightly immersed with the craft at rest. This was found to offer no significant improvement over the previous configuration.

There was some discussion at our meeting as to why Fred’s trimaran could not be steered – after all it has a conventional centreboard located in the conventional position for a trimaran centreboard and it has a decent size rudder blade, so what could be wrong? Fred’s own best guess is that the wind was simply too strong for it and he feels that it might perform better in lighter winds.
A reefable and stowable soft wing sail – Charles Magnan
The America’s Cup racing in 2017 clearly showed how well wing sails can work, particularly dual element wing sails, but that contest also clearly showed the limitations of that style of wing sail in that they were vulnerable to damage, needing to be stored indoors when not in use. Indeed, in large sizes, they require a tower crane to be standing by to take them on and off the boat before and after every sail. So it is not surprising that since the America’s Cup in 2017 there has been a lot of interest in ‘soft’ wing sails which can be lowered and folded or flaked down when not in use and ideally can be reefed according to wind strength. Groupe Beneteau is a major yacht builder which has been experimenting in this area and, as with some other projects, they have sailcloth draped around a mast , the section of the wing being formed by internal ‘ribs’ (to use aircraft terminology) which slide up and down the mast as the sail is raised and lowered. Because the sailcloth is wrapped around ahead of the mast as a single sheet it does not take kindly to being ‘scrunched up’ into a bundle as the sail is lowered or reefed, this is particularly damaging to modern Mylar or laminated sail materials.
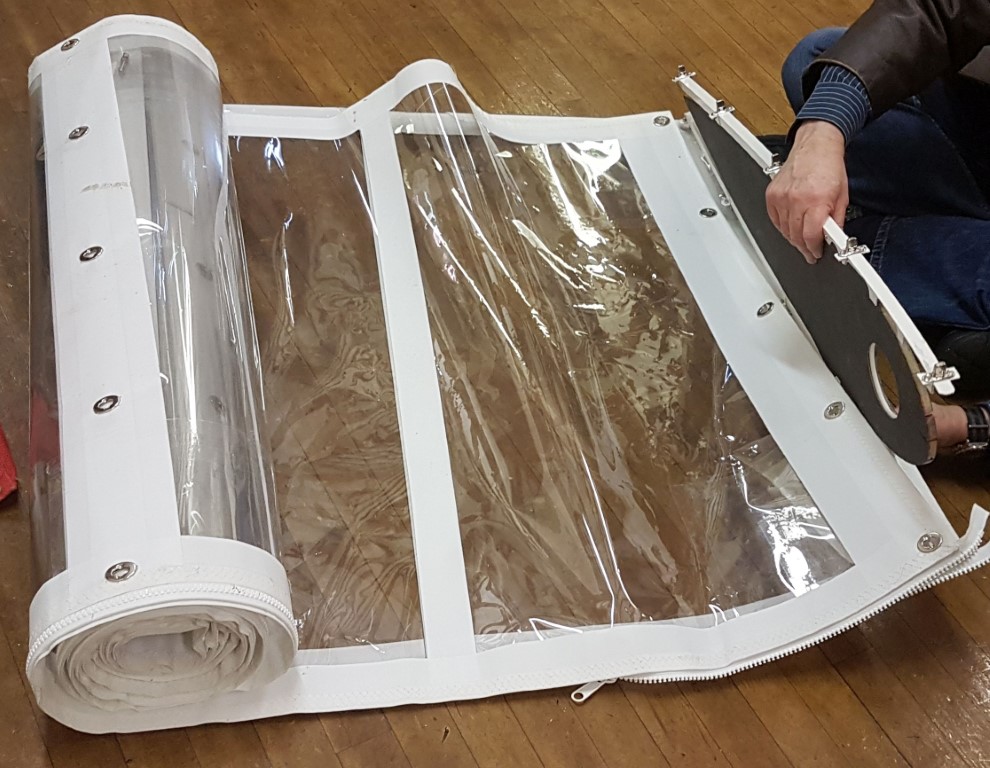

The modification that is the basis of Charles’s project is to include a zip at the ‘nose’ of the wing sail so that as the sail is lowered or reefed the zip can be progressively opened allowing the sail material to be neatly flaked down into separate bundles on each side of the base of the wing. A roller on each side could be an alternative to flaking. The zip at the front of the wing is covered by a flap of sailcloth making a reasonably clean leading edge to the wing.
Charles has made a dinghy sized prototype for one element of a two element wing sail, this is now close to being ready for on-water trials. The canvas work has been done professionally and this looks strong and well made. The ribs at the top and bottom of the wing (Charles is holding one in the picture above) are 200gm/m2 carbon cloth vacuum bagged to 10mm Corecell. The intermediate ribs are a more open framework, see picture at right. A sliding part within each intermediate rib allows the ‘tail’ of the rib to be opened out, which makes it easier to remove the sail-skins from the ribs and flake them down for reefing. (I use the term ‘sail skin’ for each side of a soft wing sail, this being the term adopted in the class rule for the next America’s Cup races) Clipped onto each side of each rib are flexible channel sections (the white parts in the pictures) and the sail skins are attached to these by a series of twist lock fasteners. To remove the sail skins from the ribs, the flexible channels are unclipped from the ribs and rolled up with the sail skin, or for longer term storage the channels can quite easily be removed from the sail skins using the twist lock fasteners.
Charles went on to tell us about his experience with using vacuum bagging to make the ribs for his wing sail and for other boat related projects he is working on. He has a Robinair vacuum pump as used by refrigeration engineers. For the wing sail ribs he bagged the laminates and core down to a sheet of glass and he achieved nice looking foam sandwich parts with a gloss finish one side and a peel ply finish the other side.
Charles has also experimented with the use of vacuum storage bags (see picture) and a household vacuum cleaner for less critical work. Vacuum storage bags were a new thing to me but looking at the internet I soon realised that they are intended for compressing clothing or bedding to take up less wardrobe space or to fit within airline baggage limits. From what Charles told us they could certainly be useful for easy vacuum bagging of moderate sized parts, say a rudder or centreboard. Charles did note that if you use a household vacuum cleaner with a vacuum bag to hold vacuum while a part is curing you need to just switch the vacuum cleaner on at intervals to keep up the vacuum, the bags include a one way valve which will hold a reasonable vacuum between times. On the other hand, if you leave a domestic vacuum cleaner running without airflow for long periods you will probably burn out the motor.
A neat Yuloh – Chris Watson
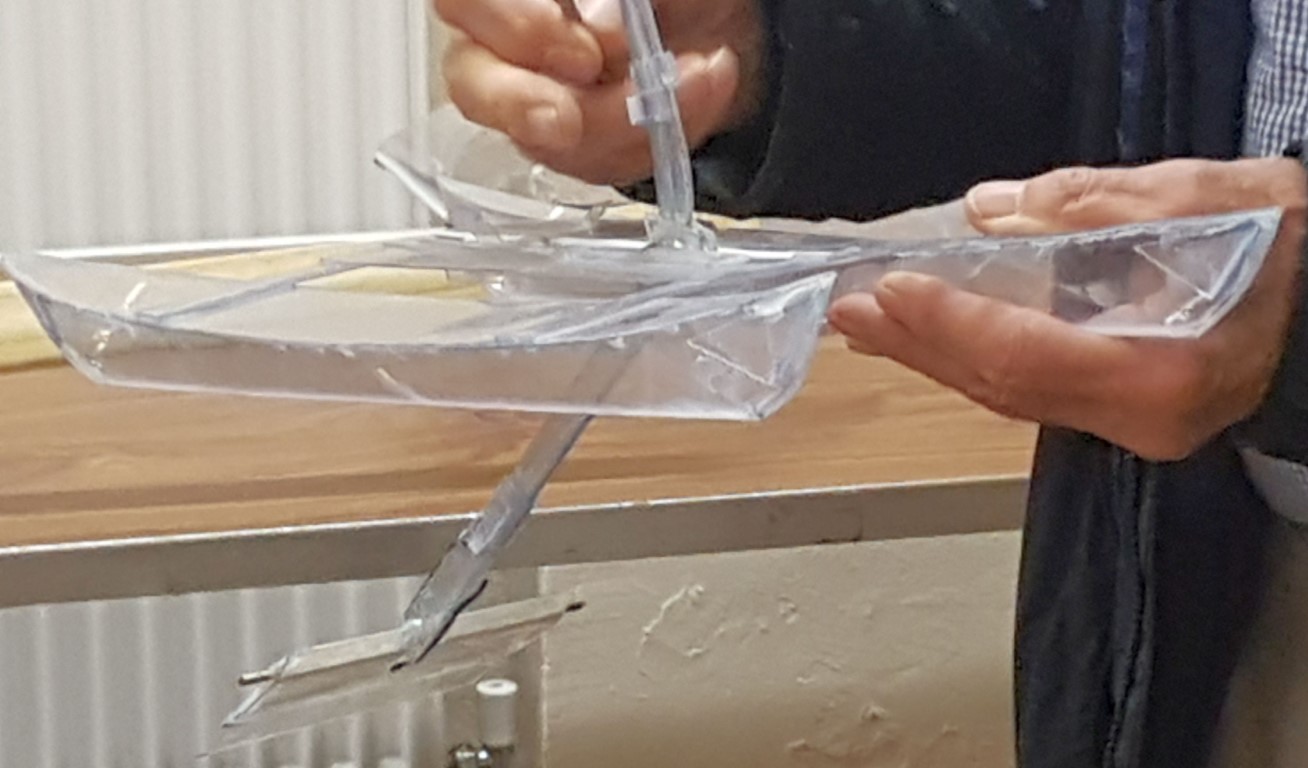
A yuloh is an oar that propels a boat by waggling it back and forth in the water, a technique generally referred to as single oar sculling (as opposed to normal sculling which is conventional rowing using two oars, one in each hand). There are two different kinds of yuloh. One kind, which is by far the most commonly seen, is used so that the direction of water flow over the blade reverses with each stroke, the high and low pressure sides of the blade remaining the same (at least for travel in one direction). The second type of yuloh, which is less commonly seen, is the type Chris showed us (picture left). With this type the water flow across the blade does not reverse but is always from a leading edge to a trailing edge, but the high and low pressure sides of the blade do swap over at each stroke.

I will not speculate here as to which is the more effective type of yuloh but Chris told us that he finds his one at least comparable to conventional oars for propelling a small dinghy. The device can be used with a conventional transom sculling notch, or a transom mounted rowlock. The hinge at the top of the aerofoil section blade is a heavy duty stainless steel door hinge, Chris told us that this is not unduly expensive even though it incorporates stainless steel ball races. The ‘flap angle’ of the blade is limited by a simple adjustable cord made off on a cleat. The piece of elastic hanging loose in the picture is used to dampen the ‘clunk’ as the blade flaps over between strokes. The area of blade in the water is probably similar as for a typical pair of oars, the blade is giving a more continuous thrust than you can get from oars and you have the benefit of a variable ‘gear ratio’ by adjusting the line limiting the flap angle, hence I would expect this device to work well against a strong headwind or as a low speed propulsion device for a fairly large heavy boat. Indeed, yulohs were, or are, used in Chinese waters on heavy cargo carrying Sampans. It did occur to me that if this device were made with an additional hinge so that the handle folded alongside the blade it would actually be a more compact item to stow than a conventional oar. Another thought was that it could be applicable to the running and sailing races such as the Three Peaks race for which the racing rules allow sailing boats to be propelled by human power in a calm. A device of this kind would be easy to stow and could be used with minimal need for additional fittings to attach it to a sailing yacht.
Wave Powered Model Boats – Chris Watson
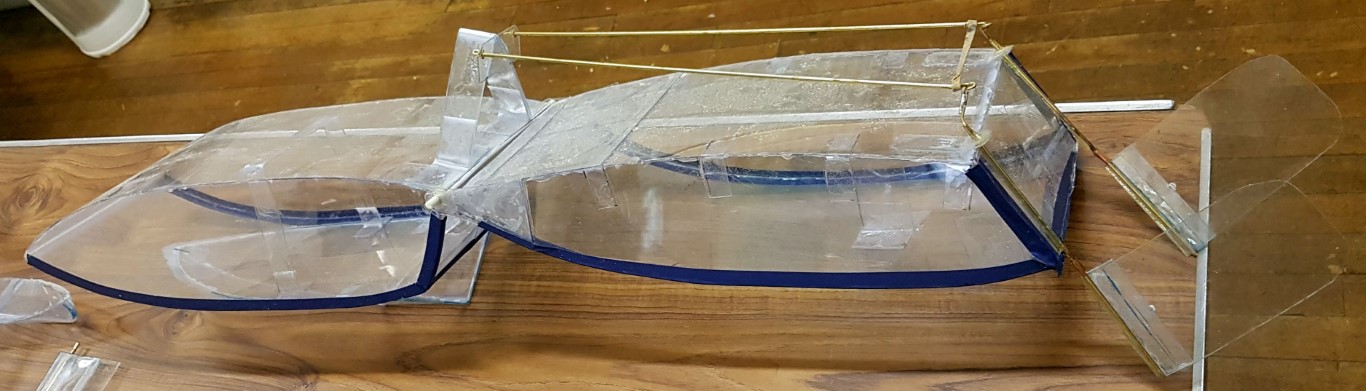
Chris went on to show us three little models he has made by gluing sheets of transparent plastic. These are all wave powered boats and Chris told us that they all work well when tested in a bath or a pond. The one above is reminiscent of the ‘Salter Ducks’, once considered as a way to generate ‘renewable’ energy, but rather than using the articulation between the two hulls to power a generator the movement is taken via a pair of push/pull rods to flap two vanes at the back end of the craft. These vanes are flexible, like a fish’s tail, and so they provide propulsive force.

The second model works on a similar principle but has three hulls, with a pivot axis between the forward hull and the slightly overlapping pair of smaller rear hulls.
The third model is a bit different to the other two in that it can be wave powered or human powered, or possibly both at the same time. It is a catamaran with hull forms similar to a classic Wharram catamaran. A pivoted vane below the boat swings up and down when actuated by a lever arm extending above deck level. So, by working on this lever, a human can power the boat along by flapping the vane vertically, as a whale’s tail rather than horizontally as a fish’s tail. Vertical flapping has the advantage that it can be used in quite shallow water by keeping the amplitude of the motion small with the vane close to the surface. Also, if the lever is locked to hold the vane at maximum depth the vane will be in fairly still water down below the surface turbulence so that if the boat above is rocking about in waves the vane will be flapping relative to the stiller water and will provide forward propulsion. This is similar in principle to the Liquid Robotics Inc. ‘Wave Gliders’ which are autonomous vessels used for oceanographic research and I recall that at a previous AYRS meeting Chris showed us a working model he had made based on the Liquid Robotics vessels.
Chis also mentioned the Japanese team lead by Dr. Yutaka Terao which completed a 4,350 mile voyage in the Pacific ocean with a wave powered boat. The hoped for average speed was in the three to four knot range but unusually calm seas reduced this to an average of about 1.5knots. A review of the history of wave powered boats, including this Japanese one, can be found at http://folk.ntnu.no/eirikbo/wavepropulsion/index.html
Surf Rescue craft – Kim Fisher and Chris Watson

Kim presented this project which he is carrying out in collaboration with Chris. The aim is to produce a rescue craft, primarily for use by beach lifeguards, which has greater capability than a simple surfboard but is less expensive and simpler to deploy than powered craft such as RIBS and jet skis.
The concept that Kim and Chris have developed to meet this requirement is a broad stable boat that is symmetrical about a horizontal mid plane so that it remains functional if it gets capsized in the surf. This symmetry also simplifies construction, requiring only one set of moulds. As shown in the pictures, it is roughly rectangular in plan form and in cross section it is a ‘tunnel hull’ along most of its length, but not at the bows where bridging the tunnel hull gives extra buoyancy to mitigate bow burying in surf. The tunnel hull below the water gives good stability and on the upper side the same form provides a recess to help avoid crew and casualties being swept off in rough water.

Interestingly, it is proposed to propel this craft by the single operator using a forward facing stand up rowing technique. Vertical tubes are bonded into the hull on each side of the boat and poles slot into these to support the rowlocks for stand up rowing. Certainly you can find plenty of material on the internet about Australian surf rescue teams using rowing boats, often with a person standing at the stern using a steering oar, but from my quick look at U-tube I think the rest of the crew are seated and rowing conventionally so it will be interesting to see how the standing and forward facing rowing technique develops for this application.
The exterior of the boat is smoothly curved all over, with no awkward projections that could hinder getting a casualty on board over either the bow or the stern. There are strong tubular stainless steel rails running along the sides of the boat both above and below. The upper rails act as grab rails and securing points for towlines and equipment whereas the rails underneath are used as runners allowing the boat to be dragged down a rough beach without damage or they can act as skids for rescue work on ice. This boat should be useful on water, ice or even pushing it over soft mud.
Comparing this craft with the surf boards that are standard equipment at many beach lifeguard stations, this craft is likely to be more suitable for conveying a disabled casualty and a much better platform to provide a ‘refuge’ between the point of rescue and the shore . Whereas a surfboard remains on shore most of the day, this craft could possibly be stationed just outside the surf line with the operator sitting high up on a fabric seat clipped to the two poles that support the rowlocks. Watching the swimming area from such a location places the craft in a good position to move down the wave direction to make a rescue, avoiding delay in running down the beach with a surf board then battling out against oncoming surf (dare I mention Baywatch!).
Comparing this craft with powered rescue boats such as RIBS, it is obviously much less expensive, both in initial cost and in maintenance costs. It is also much lighter so can be carried on a car roof rather than requiring a trailer and it can be dragged down a beach by one person rather than requiring a launch trolley and in most cases more than one person to handle both a heavy boat and a launch trolley. As previously mentioned, it can also double as a craft for rescue on ice and on mud flats.
Although at the present time oars are considered to be the simplest and cheapest propulsion for this craft some consideration has been given to powering it with two electric thrust units with ducted propellers, one on each side of the craft. These would be on swinging mounts so whichever way up the craft is they would drop down and be immersed.
The prototype that Kim and Chris have very recently completed is the third and largest prototype. The first one was only about 2.4m long and clearly too small for rescue work but was used for trying out the forward rowing technique as seen in a video clip Kim showed us.
Kim showed a number of pictures of the construction of the current prototype. Basically it is a pair of grp mouldings taken from a single female mould, although roto-moulding would be considered for any future production run. Coremat was used in some areas of the laminate for stiffness and Bighead fasteners were glassed in to provide fastening points for fittings. The stainless rails are spaced off the hull with parts that were 3D printed at a very reasonable price. A horizontal slab of polyurethane foam is placed internally between the two mouldings to provide reserve buoyancy in the event of hull damage and both mouldings are bonded to this slab so as to make a stiff floor in the central area where the crew will stand. The foam slab extends right to the sides of the craft and grp laid up on the edges of the foam slab ties the top and bottom moulding together at the edge seam (See diagram below).
Kim explained many details of the construction which would interest other amateur boat builders but I shall not go through all these points in this report since Kim will himself be writing in more detail for our publications.
So what next for this fascinating project? – Well the prototype boat is now ready to start trials and I am sure Kim and Chris will be keen to hear from volunteer test crew who have experience of beach rescue and/or experience of handling small engineless craft in difficult conditions. My own thought is that the proposed method of propulsion is the biggest unknown. Some time may need to be set aside to develop and prove the operating techniques to reach a level of expertise to make a convincing demonstration, perhaps on video, for potential users such as the RNLI. Meanwhile, Kim is planning to bring the prototype to our meeting at Thorpe in January and we also plan for it to be the central feature on our exhibition stand at the RYA dinghy show in March – contact Kim if you would be able to help with setting this up.
Hull drag measurement by tow testing – John Perry
We made hull drag measurement by tow testing the main activity at the AYRS meeting held at the Basingstoke Canal Centre in September this year. My report on that meeting should appear on our website and/or in one of our publications in due course.
My intention when including tow testing in the program for the canal centre meeting was to offer an activity for everyone to get involved in some experimental work, even if some of the helpers were only able to make helpful suggestions from the security of the canal bank! I never expected that we would produce ground breaking experimental results, especially with equipment which had never previously been used afloat. I don’t think it is realistic to expect open water towing to give measurements of hull drag to the level of accuracy that would be possible with tow testing in purpose built tow testing tanks. After all, if this were possible, why were very large and expensive tow testing tanks, such as the one at Haslar near Portsmouth, ever constructed? However, with some refinement of our equipment, I am hopeful that we might get some drag measurements that we could compare with the results of theoretical methods such as the free-to-download Michlet software and we might also, for example, be able to do basic measurements on novel hapa and hydrofoil designs and perhaps investigate the effect that wave action has on the drag of small hulls. Other suggestions for the use of simple tow testing equipment would be welcome.
It is clear that the biggest errors in our experiments on the Basingstoke canal were in the speed measurement which was by timing the passage of the towed boat between two flags set up a measured distance apart on the canal bank. GPS would be more accurate than that method but reading about the errors inherent in GPS I don’t think it would match the accuracy that we are already achieving for the towline tension measurement using a load cell. So I considered two alternative ways to measure the speed of the boat being tested. The first thought was to tow with a shore mounted electric winch, measuring the line speed with an encoder on pinch rollers running in contact with the line. The second was to continue to use timing (by a microcontroller system) between measured start and finish lines but to define these lines with infra-red beams projected across the waterway rather than with flags (even though the flags did include a genuine AYRS burgee!). For the time being I have decided to go with the second method which is applicable either to towing with a tow boat or to towing with a winch mounted on a bridge across the waterway or on a promontory into the waterway. The drawing below shows the principle and the photos show the equipment I have put together. Although I have opted for the use of infra-red beams, the winch method certainly has advantages so if this project continues we might do well to re-visit that option at some stage. An electric winch could give a steady tow without risk of water disturbance from a tow boat. It would require a power supply that we can take to a possibly remote waterside location, either a portable generator or a suitable battery.
With reference to the drawing above, the screens set up on the bank provide sharply defined shadows in the beams projected across the water and the detector mounted on the moving boat picks up the time of crossing the edges of these shadows. The further the screens are from the infra-red sources the sharper should be the shadows and my preliminary tests suggested that with the source on the landward side of a canal towpath and the screens set up on the water edge, say 2 to 3 m distant, we should get pretty sharp shadows. I then found that reasonably sharp shadows can be achieved with less separation between source and screen, so I now have small screens mounted about 250mm forward from the infra-red source, this is the current state of the equipment as shown in the photographs. The ‘gunsights’ fitted on the tripod mounted projector units are to enable the system to be set up with parallel start and finish lines. With careful setting up using a surveyors tape, or a ‘laser tape’ instrument, I would think we should achieve error limits witin +/- 150mm in setting start and finish lines a nominal 50m apart, so with timing to a millisecond we should have a speed accuracy in the region of +/- 0.3%. Going to, say, 100m separation may give further improvement in speed measurement and also allow a greater averaging time for the towline tension readings. Checking the loadcell system several times over the last few weeks, using the same deadweight each time, the system has given readings consistent to within 5 grams in 2kg, so that is within 0.25%. It may be possible to improve on this by re-calibration against an accurately measured deadweight shortly prior to each set of tests so should now be able to measure speed and towline tension with comparable percentage error limits. The variation of hull drag with speed actually makes speed the more critical of these two measurements.
Since the speed timing and the towline tension measurement are both carried out on the boat that is under test I was able to make a single self-contained unit to process all the data and record it as a text file on an SD card, this is much more convenient than having to correlate data from separate instruments. (Picture above) .
A couple of days before our meeting I tested the complete system by walking the detector unit past the two projectors and all worked satisfactorily. I had intended to repeat this demonstration at the Thorpe meeting but with so many projects to be presented and discussed there simply was not time in the day to do so, maybe next time this will be possible.


Reminiscences of supervising the timing of windsurfing events during the 1970’s – Graham Ward
As a short interlude, Graham gave us some anecdotes from the time when he was involved in supervising the windsurfing events that were based on the speed canal on the French Mediterranean coast. For example, he told us about some of the checks he was required to carry out to make sure that no one was fiddling with the equipment used for timing the speed runs. This included taking apart the synchronised video cameras that monitored the start and finish of the runs to make sure that the analogue electronics within the cameras had not been tampered with to give a slower frame rate and hence a faster speed measurement! It turned out that all was perfectly above board, and the windsurfers really were travelling at some tens of knots, something that in those days some people were finding hard to believe could be real.
Finite element analysis on a 6m Trimaran – John Perry
A friend of mine has a small French manufactured trimaran with a tiny cuddy cabin. He would like more stowage space for small items in the cabin so he is considering cutting two holes through the bulkhead at the forward end of the cabin to give access into small stowage lockers that he would fit into the presently empty space forward of the bulkhead. This bulkhead is supporting the mast so he asked me if I could give an idea of whether the bulkhead with holes cut in it would still be strong enough to take the download from the mast which he estimated at up to 1200kgf. I carried out Finite Element Analysis (FEA) to compare maximum stress levels before and after cutting the holes in the bulkhead. We were not so much concerned with the actual level of stress or factor of safety, we simply did not want any modifications to the boat that would cause stresses to be significantly higher than the present situation without the modifications.
I presented the results to our meeting as a simple example of the application of FEA stress analysis to small boat design work. The first set of results were for cutting the holes through the bulkhead without making any other alteration to the boat and this did significantly increase the maximum stresses. The mast step is mounted on the cabin top slightly aft of the supporting bulkhead, there being a small ‘fillet’ within the cabin space that is clearly intended to transfer load from the mast step onto the bulkhead – see photo above. It was clear from the distortion plots produced by the FEA that the main cause of high stresses was this fillet being rotated by the mast load so that the lower corner of the fillet pressed into the bulkhead, bending the bulkhead forward. Moving the mast step a few inches forward to centre the load over the bulkhead would correct this problem but this would require alteration to the moulded grp cabin roof and of course helm balance could also be affected. So I ran the analysis again with a small stiffening member bonded to the forward side of the bulkhead, such a stiffener could easily be incorporated in the structure of the new stowage cupboards. We were pleased to find that with the holes cut though the bulkhead in combination with this additional stiffener the maximum stresses were actually well below the levels for the unmodified structure.
Review of recent worldwide advances in sailing and sailing boat design – John Perry
I gave the meeting a review of recent developments in the world of sailing, as I see it, based not on personal experience but on ‘surfing’ relevant websites. This did produce some interesting discussion, particularly with regard to the America’s Cup, an area where there has clearly been a lot of innovative work during the past year or so. However, I will refrain from further detail here since this is already a long report and unlike the other presentations covered above, this was not about any AYRS members projects (although it could of course inspire future member’s projects). However, if it is of interest to the audience, I am happy to continue to offer my take on current developments in sailing at future meetings and I have also wondered about having a section of our website that reports on such developments.
A model for a rudder design – Mark Tingley
Mark Tingley rounded off our meeting with a quick presentation of a balsa wood model he has made for a trimaran rudder design. This stems from a problem he has previously mentioned in connection with his present trimaran which has a dinghy style pivoted rudder blade. He has found that the rudder blade can swing back when sailing fast, even in deep water, it doesn’t only happen if the blade touches the bottom in shallow water. With the blade fully down the rudder is partially balanced but once it swings back, even only slightly, the helm becomes very heavy and the boat becomes difficult to steer, sometimes even impossible to steer – he said that if he applied enough force to steer the boat sailing fast with the rudder partly raised he would simply bend the tubular aluminium tiller.
The model that Mark presented showed a partially balanced spade rudder with the rudder stock fitted through a section of the hull stern which hinges up about a pivot axis at deck level a little forward of the rudder stock. This is basically as the rudder arrangement seen on the 26 foot Firebird catamarans that were built in Cornwall back in the ‘90s – I think a small fleet of them are still based at Falmouth. The advantage of this arrangement is that the balance of water pressure on the rudder remains essentially unchanged as the rudder lifts since the pivot axis lifts with the blade itself. However, as soon as helm is applied there will be a tendency for the aft section of the hull together with the rudder to lift so some kind of locking device is needed to hold the rudder and stern section down when underway. Mark has come up with a locking device, of his own design, which leaves the pivoting stern free to jump up when the helm is more or less on centre but locks the stern down if the helm moves more than a small angle off centre. This means that it is always possible to steer the boat with a balanced rudder and the rudder is still protected from damage by striking the seabed while the helm is close to centre, which is most of the time.